No products in the cart.



The main aim of this project is to design a smart wheel chair which can control manually through hand gesture using MEMS and which can control autonomously using lidar and GPS and also which can follow the human automatically using IR transmitter and receiver.
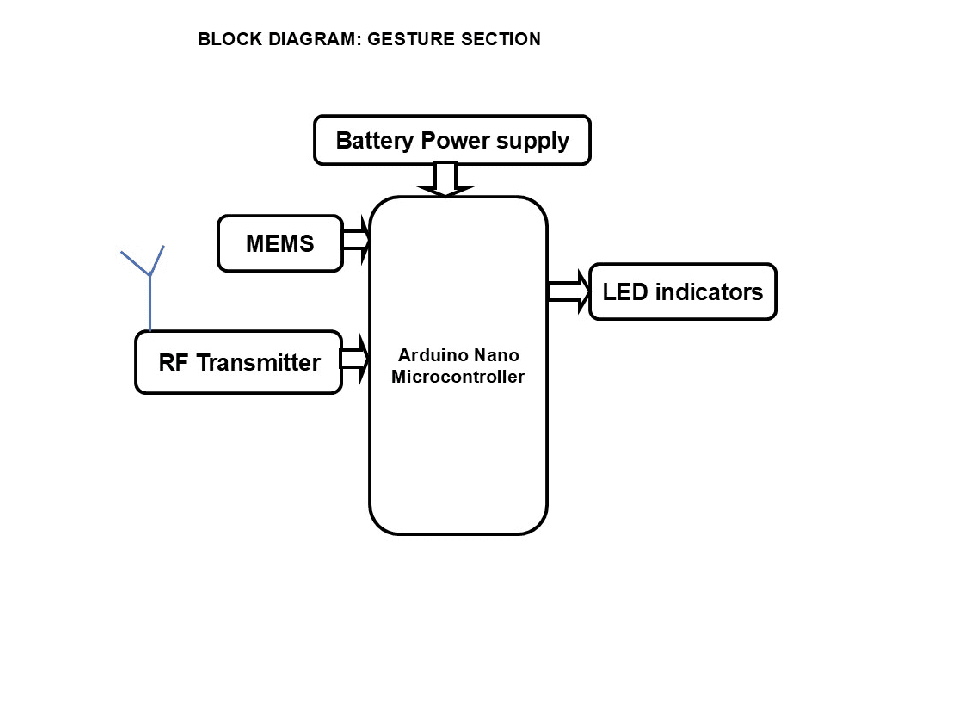
To control the wheel chair by hand movement using MEMS. MEMS is a Micro Electro Mechanical Sensor which is a highly sensitive sensor and capable of detecting the tilt. This sensor finds the tilt in X and Y directions and these measured values are sent to the microcontroller. Microcontroller converts these raw values into a human readable value. Wheel chair movement can be controlled in Forward, Reverse, Left, Right and stop direction using MEMS by using wireless RF technology.
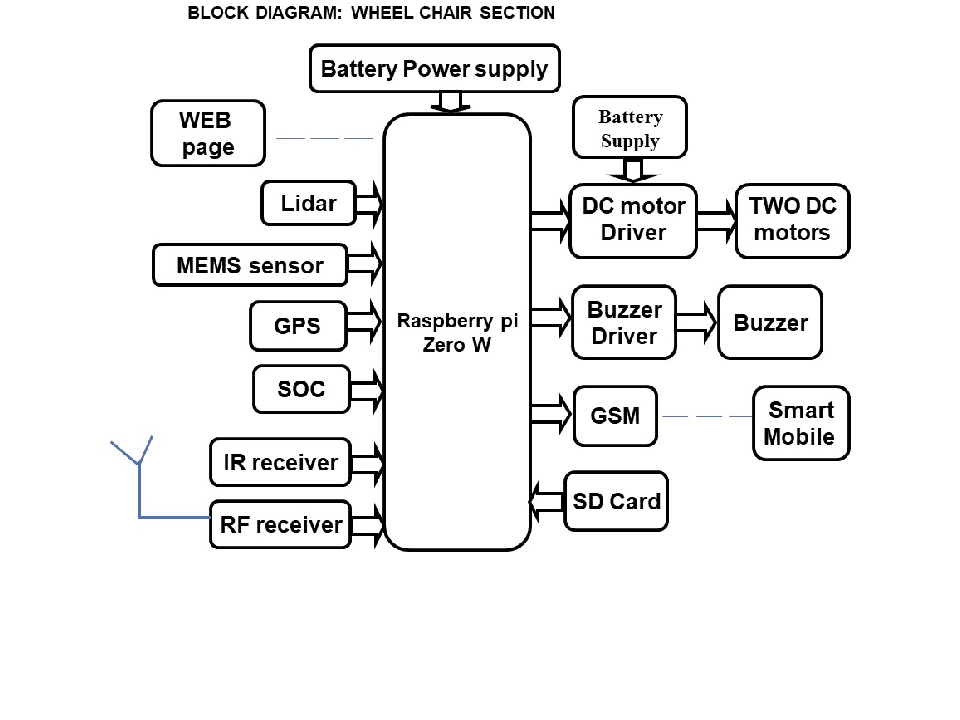
Wheel chair consist of MEMS sensor to detect the fault. IR receiver at wheel chair and IR transmitter at person is used for human following. Lidar is used for autonomous navigation and obstacle avoidance. Raspberry pi zero W has inbuilt wi-fi, if the user selects the location from WEB page, it goes to that location avoiding obstacles. GPS is used for location tracking. SOC is used for emergency intimation. If the user presses the SOC button, wheel chair stops automatically and emergency call goes to the predefine mobile number through GSM and simultaneously the buzzer beeps automatically. As per user request raspberry pi can control the wheel chair using DC motors by using Battery power. In this project we are using PIC microcontroller to read the joystick data and sending this data to the raspberry pi using RF technology. To achieve this task Raspberry pi loaded program written in python language.
Features:
 video:
video:
- Design a hand gesture control prototype wheel chair.
- Autonomous navigation and obstacle avoidance using LIDAR.
- Wireless controlling of wheel chair using MEMS technology.
- Automatic fall detection using MEMS technology.
- Automatic intimation using GSM technology.
- GPS based location tracking system.
- IR based human following wheel chair.
- Audible alerts using BUZZER.
- Wheel chair stops Automatically if the person presses the SOC switch.
- To achieve this task Raspberry pi and ARDUINO NANO Microcontroller.
- Battery power supply.
- Raspberry pi zero W.
- SD card.
- IR sensor.
- Lidar.
- GSM.
- GPS.
- Buzzer.
- Arduino nano Microcontroller.
- DC motors with driver.
- MEMS for fall detection.
- MEMS for hand gesture.
- RF transmitter and receiver.
- SOC switch.
- Arduino IDE for dumping code into ARDUINO Nano Microcontroller.
- Raspbian OS.
- Python language.
- Express SCH for Circuit design.
 video:
video:







