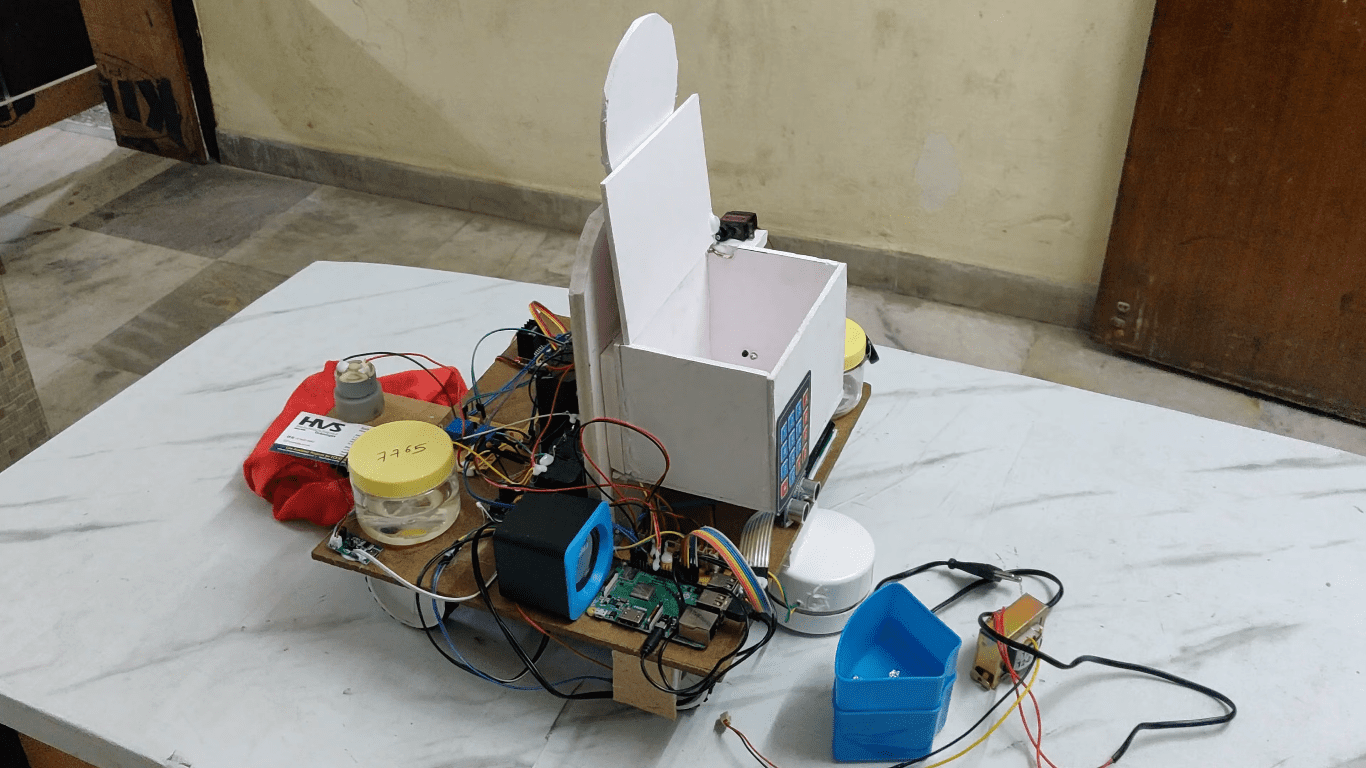
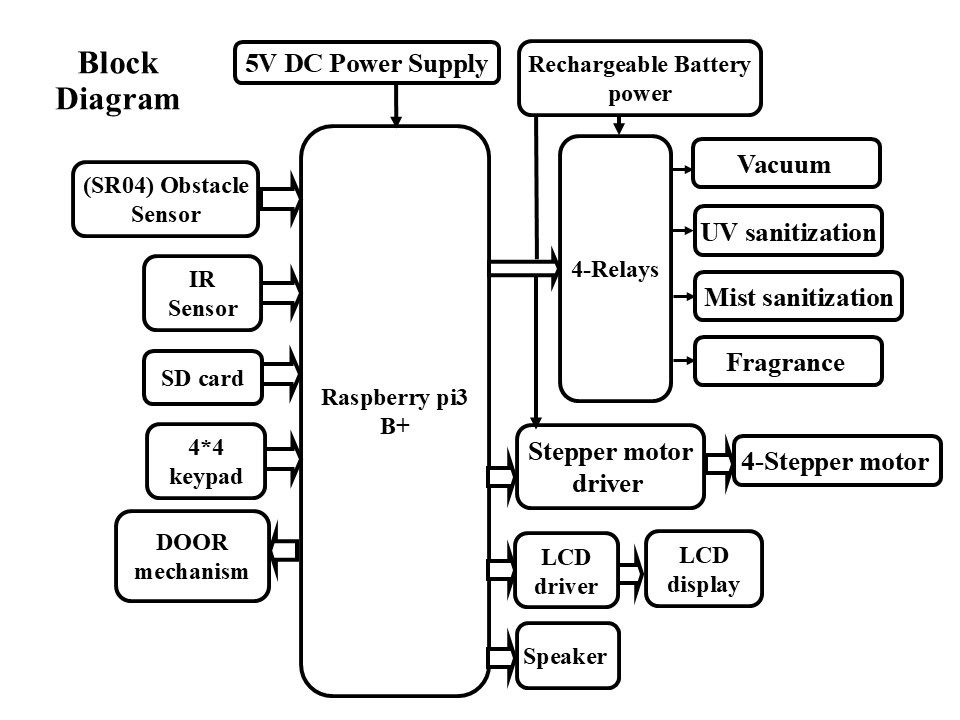
The Food Serving and Cleaning Robot is an intelligent, autonomous service robot designed to automate food delivery and table cleaning operations in restaurants, hotels, and canteens. The system is built around a Raspberry Pi 3 B+ controller, which coordinates navigation, sensing, actuation, and user interaction.
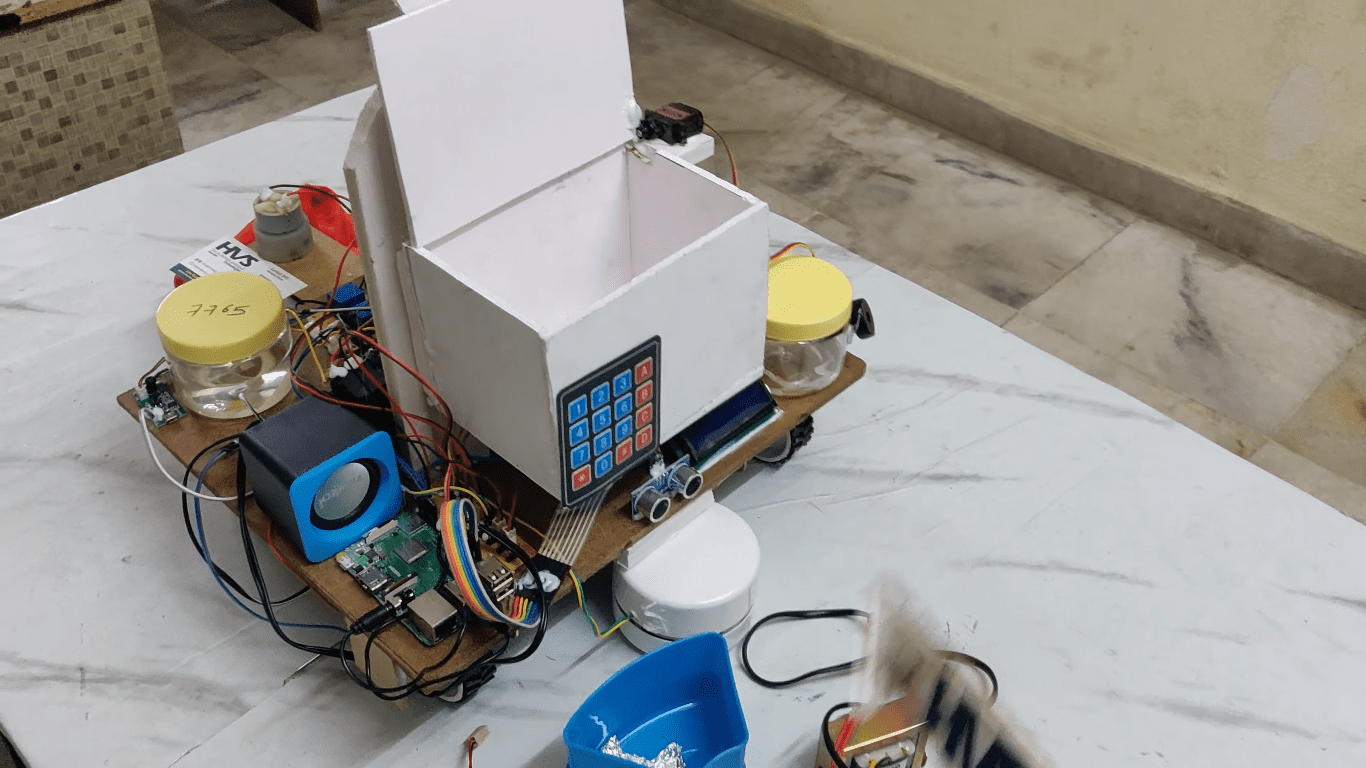
The Food Serving and Cleaning Robot is an intelligent, autonomous service robot designed to automate food delivery and table cleaning operations in restaurants, hotels, and canteens. The system is built around a Raspberry Pi 3 B+ controller, which coordinates navigation, sensing, actuation, and user interaction. A 4×4 keypad allows the chef or operator to select predefined paths from the kitchen to specific tables, enabling accurate and repeatable navigation.
For safe movement, an ultrasonic (SR04) obstacle sensor continuously monitors the path. When an obstacle is detected, the robot stops and provides a real-time voice alert through a speaker, requesting people to move aside. An IR sensor integrated into the door mechanism detects the presence of a food plate. Upon reaching the destination table, the lid opens automatically for food collection, and a voice prompt guides the customer to collect the food.
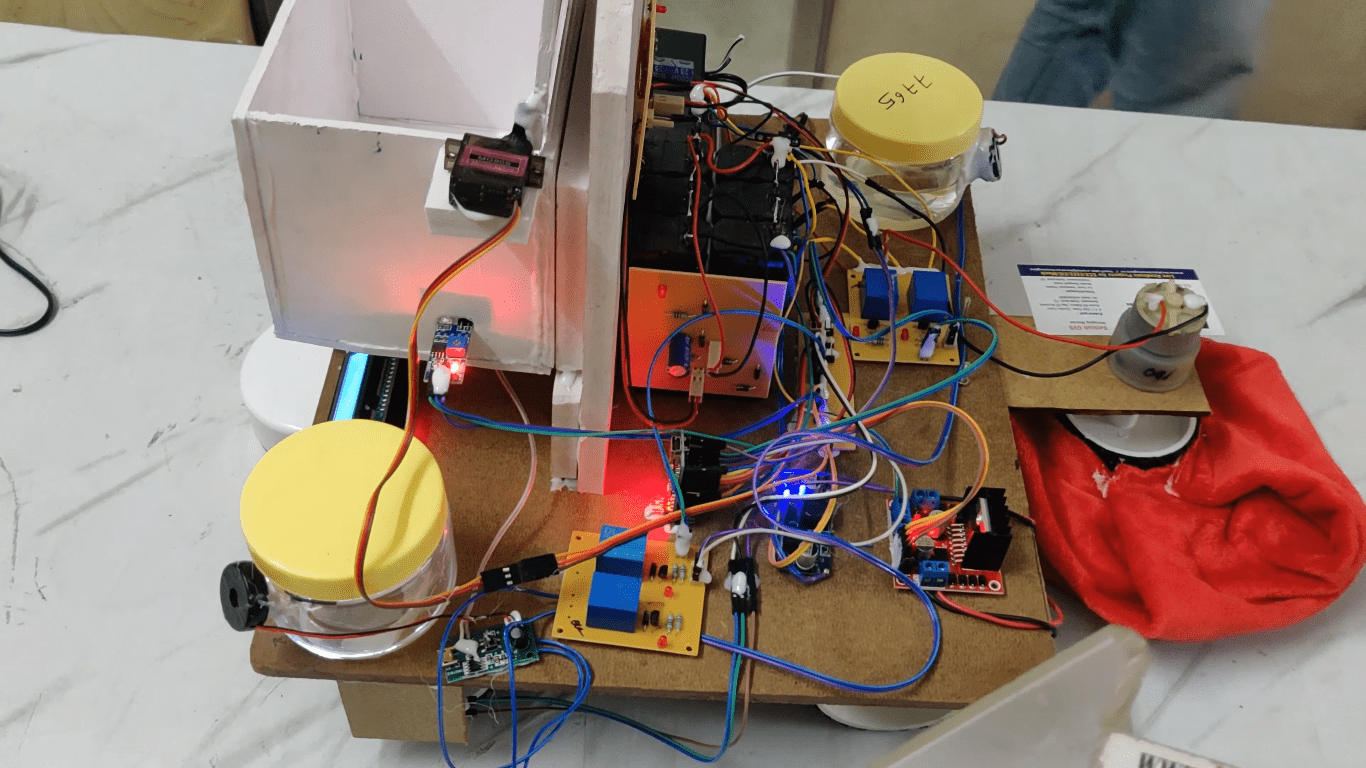
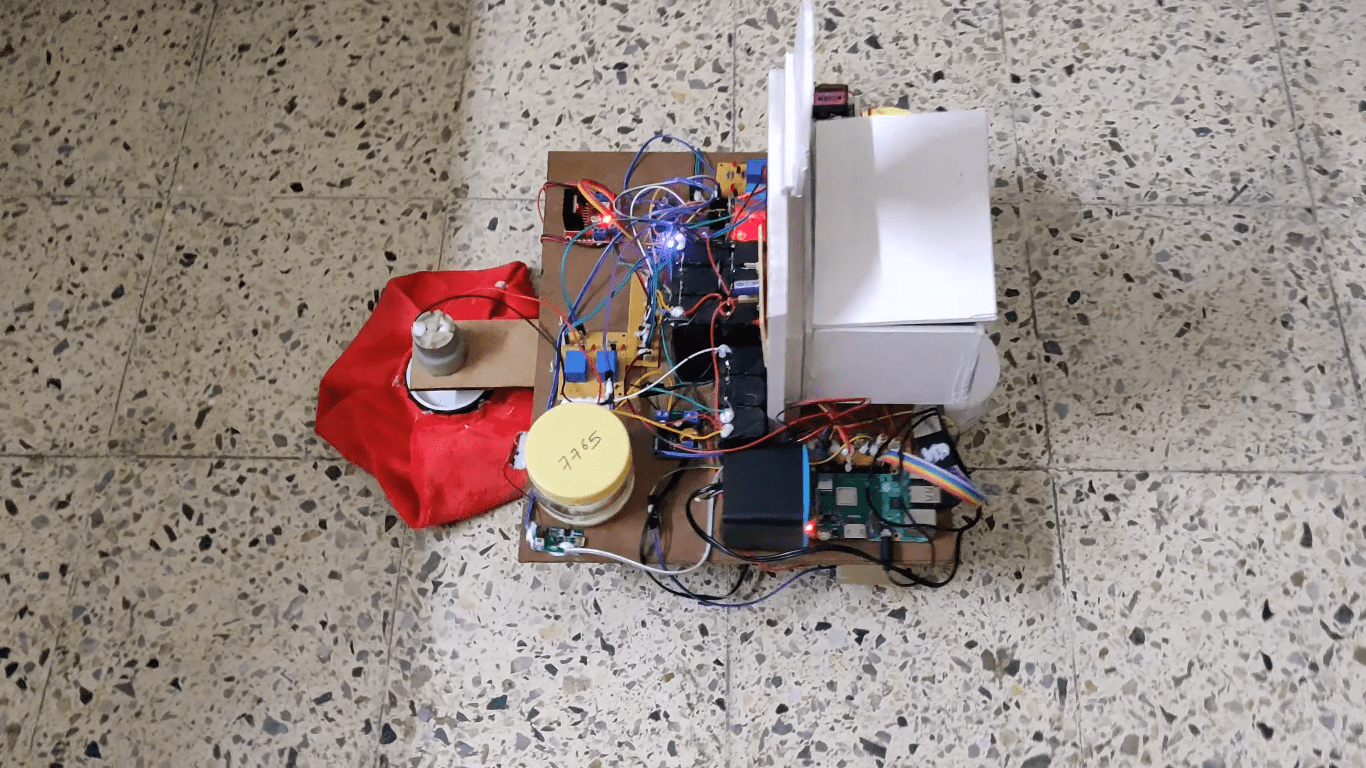
After serving, the robot autonomously returns to its initial position. The same keypad is used to select the cleaning mode and table numbers (Table 1 to Table 5). The robot then visits each selected table sequentially to perform cleaning operations, including vacuum cleaning, UV sanitization, and mist-based sanitization. While returning, a fragrance spraying system is activated. All cleaning modules are controlled using relay circuits interfaced with the Raspberry Pi.
Stepper motors driven through a stepper motor driver ensure precise movement and positioning, while an LCD display provides system status updates. Powered by a rechargeable battery supply, the proposed robot reduces human effort, enhances hygiene, and improves efficiency in food service and cleaning operations, making it highly suitable for modern automated hospitality environments.
Objectives:
To design and develop an autonomous food serving robot using Raspberry Pi for restaurant and canteen environments.
To enable predefined path selection from the kitchen using a keypad for accurate food delivery to selected tables.
To ensure safe robot navigation by detecting obstacles using an ultrasonic (SR04) sensor and providing voice alerts.
To automate food collection by detecting plates using an IR sensor and opening the lid mechanism automatically.
To provide voice guidance to customers during food serving through a speaker system.
To enable the robot to return automatically to the initial (kitchen) position after food delivery.
To implement an automated table cleaning system including vacuum cleaning, UV sanitization, and mist sanitization.
To allow user selection of tables (Table 1 to Table 5) for cleaning using a keypad.
To control cleaning modules and fragrance spraying using relay circuits interfaced with Raspberry Pi.
To reduce human effort, improve hygiene, and increase efficiency in food serving and cleaning operations.
 1 × ₹12,500.00
1 × ₹12,500.00

 video:
video: