No products in the cart.


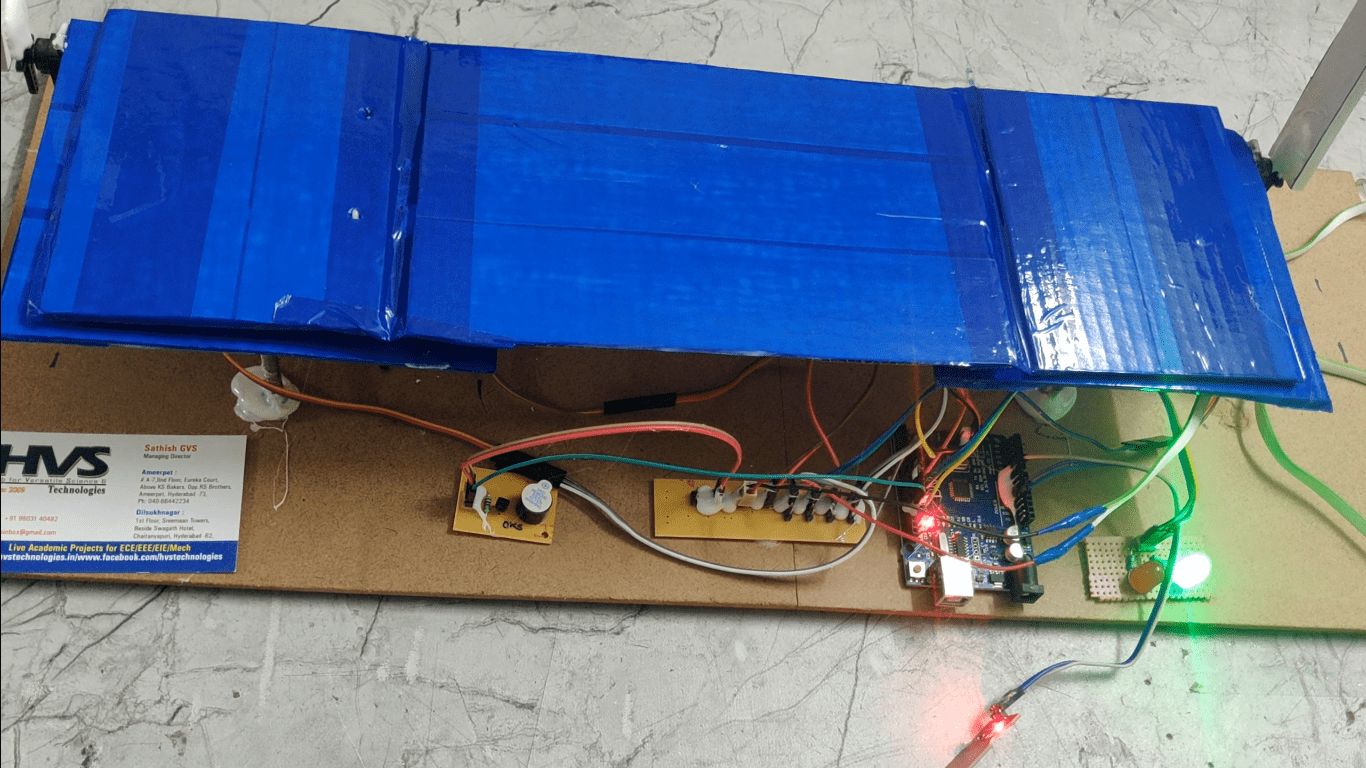
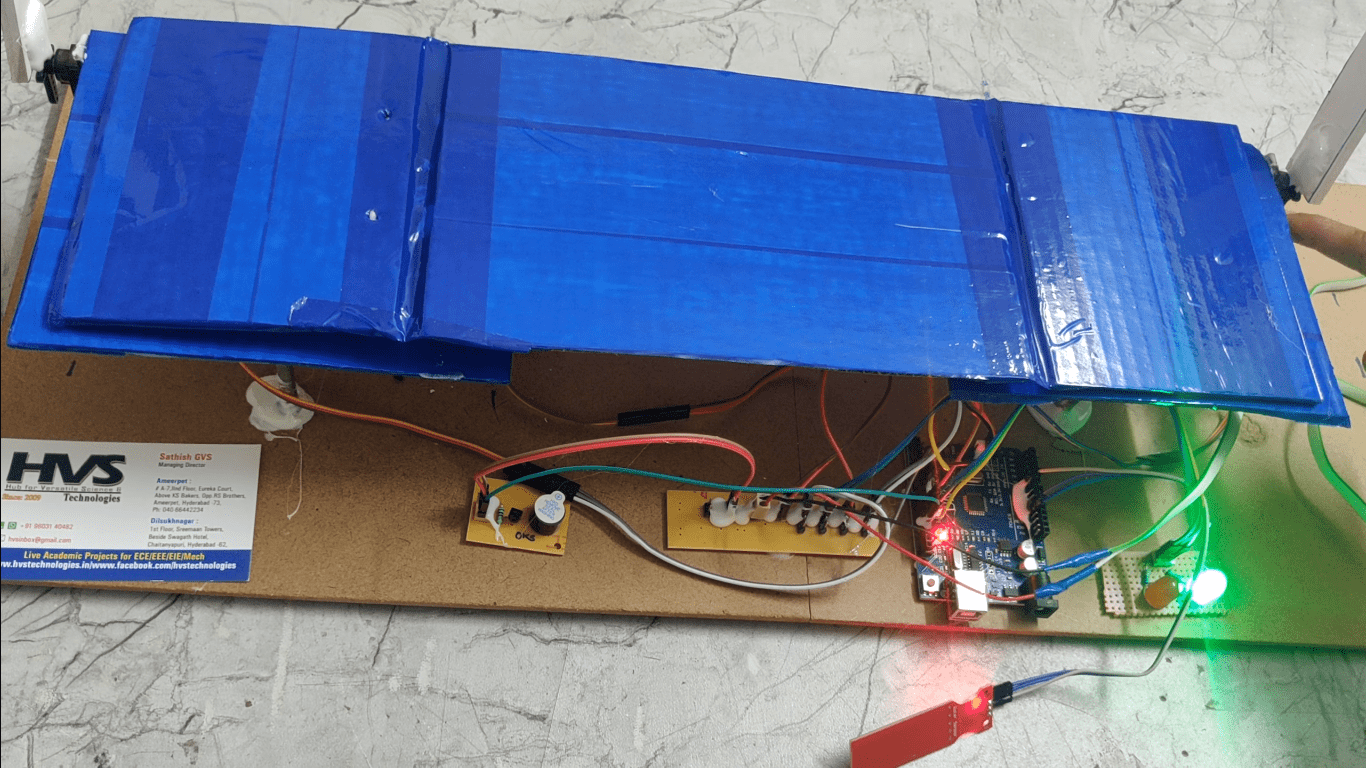
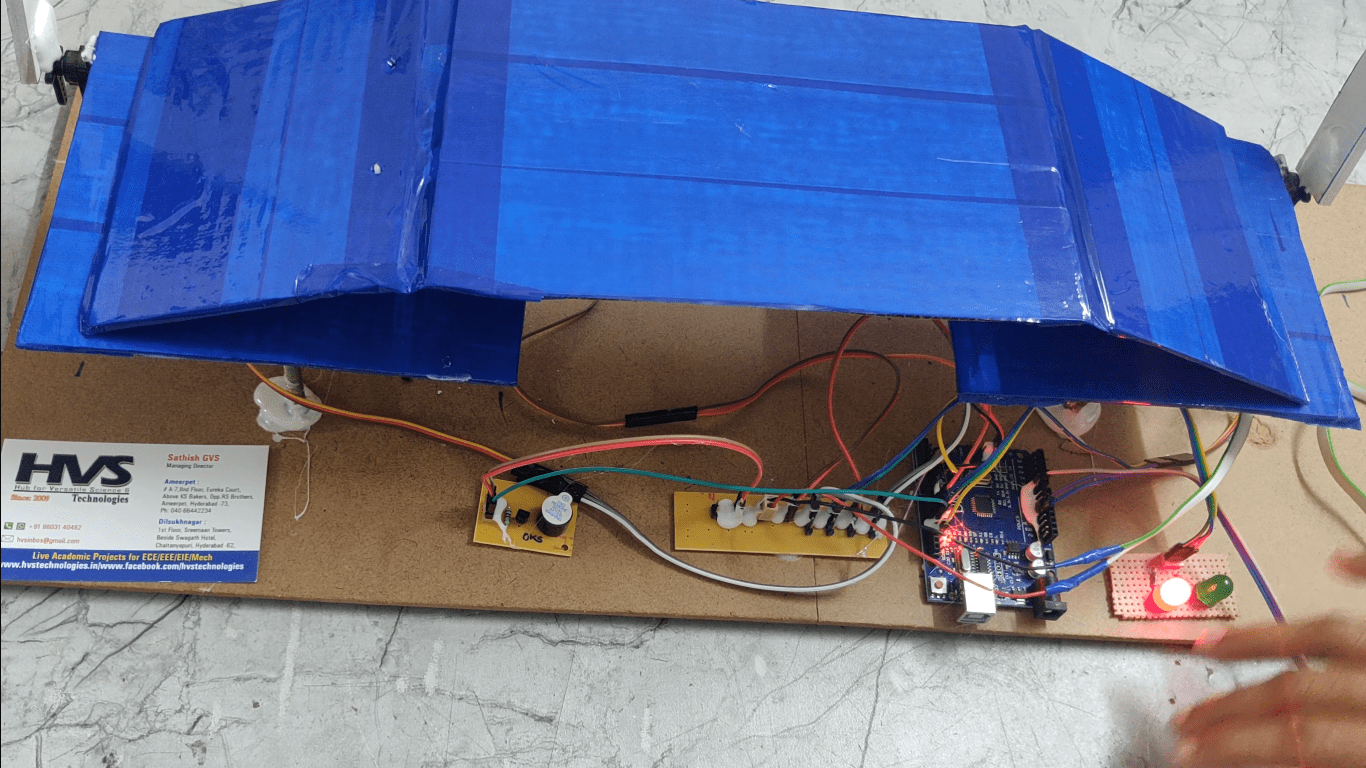
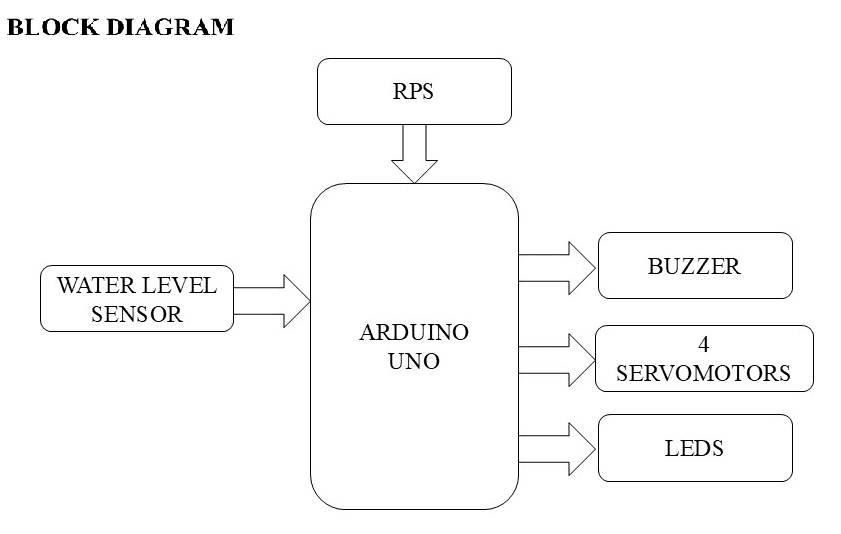
This project presents an innovative system for automatic height adjustment of a bridge model using an Arduino Uno, four servo motors, a water level sensor, a buzzer, and LEDs. The setup is designed to simulate a bridge that automatically adjusts its height based on various environmental conditions, particularly water levels, making it ideal for controlling the passage of boats or vehicles. The system uses four servo motors to adjust the height of the bridge with a range of up to 5 feet, based on input from a water level sensor that detects the rise or fall of water beneath the bridge. When the water level reaches a predefined threshold, the bridge automatically elevates to allow the safe passage of boats. The buzzer acts as an alert mechanism, notifying the user when the bridge is in motion or when the water level has reached a critical point. LEDs provide visual indicators to show the current status or position of the bridge. This automated system enhances the safety, efficiency, and responsiveness of bridge height adjustment, particularly in areas prone to fluctuating water levels, ensuring optimal functionality for both traffic and water navigation.
This project provides us learning’s on the following advancements:
 video:
video:
- Automated Control Systems: Understanding how to automate processes using sensors and microcontrollers like Arduino.
- Servo Motor Integration: Learning position control and interfacing motors with microcontrollers for precise movement.
- RPS.
- Arduino uno.
- Water level sensor.
- 4 servo motors.
- Buzzer.
- Leds.
- Embedded C programming.
- Arduino IDE Studio compiler for dumping code into Micro controller.
- Express SCH for Circuit design.
 video:
video:







