No products in the cart.


Self-driving cars are autonomous vehicles that can drive by themselves without any human interference and has the potential to mark the technological revolution of the next decade. This work presents the development of a low-cost prototype of a miniature self-driving car model using simple and easily available technologies. For safe driving and to avoid accidents, it is important to detect the traffic signs on the road and to take the decisions in real time. The purpose of this work is to build a system that autonomously maneuvers itself on a track by recognizing road signs. In order to do this, it should be able to record the road ahead in real time, and accurately identify the road signs and take corresponding response within the stipulated time.
The overall system is aimed at enabling an autonomous car to detect, recognize road signs, detect lane path ahead and to take appropriate decision to stop / continue driving. The proposed system consists of the following phases viz., Road Sign Recognition, Lane Following Control and Autonomous Driving on Assigned Track.
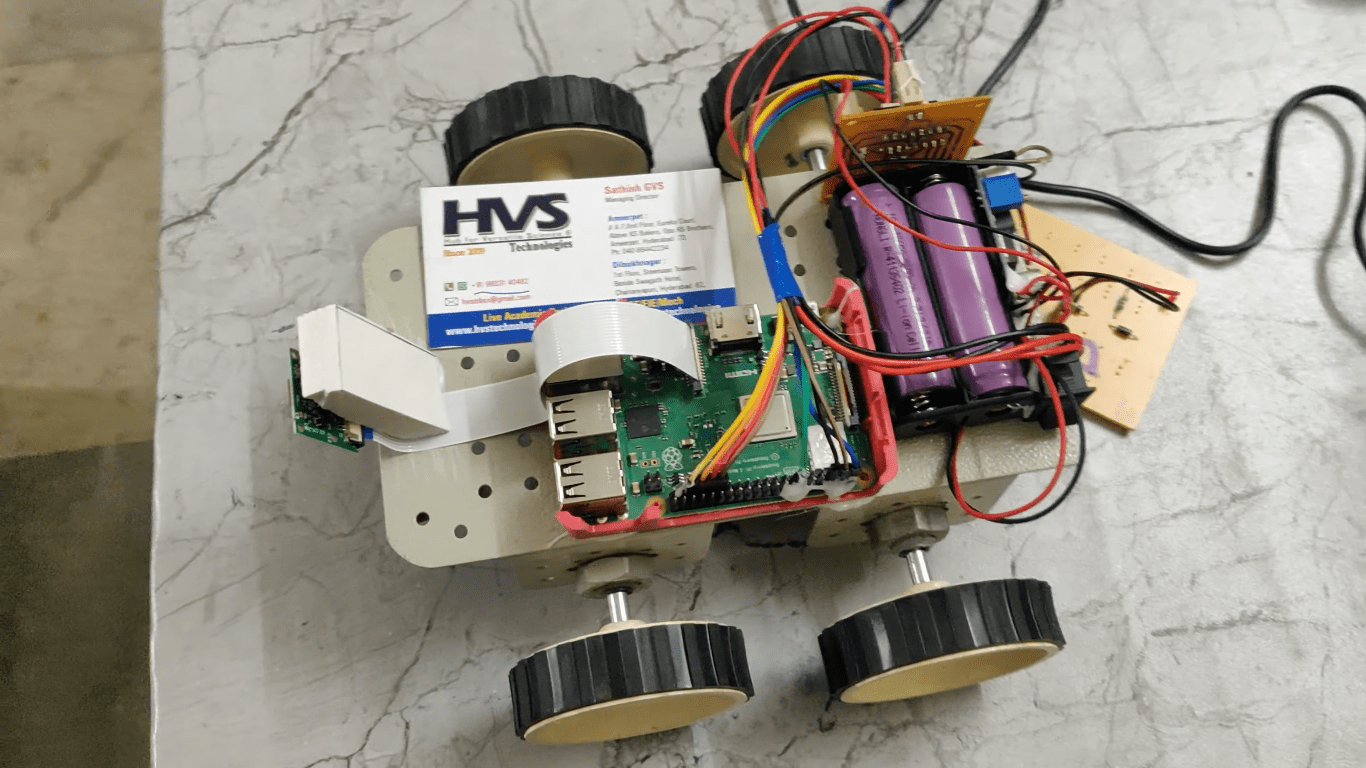
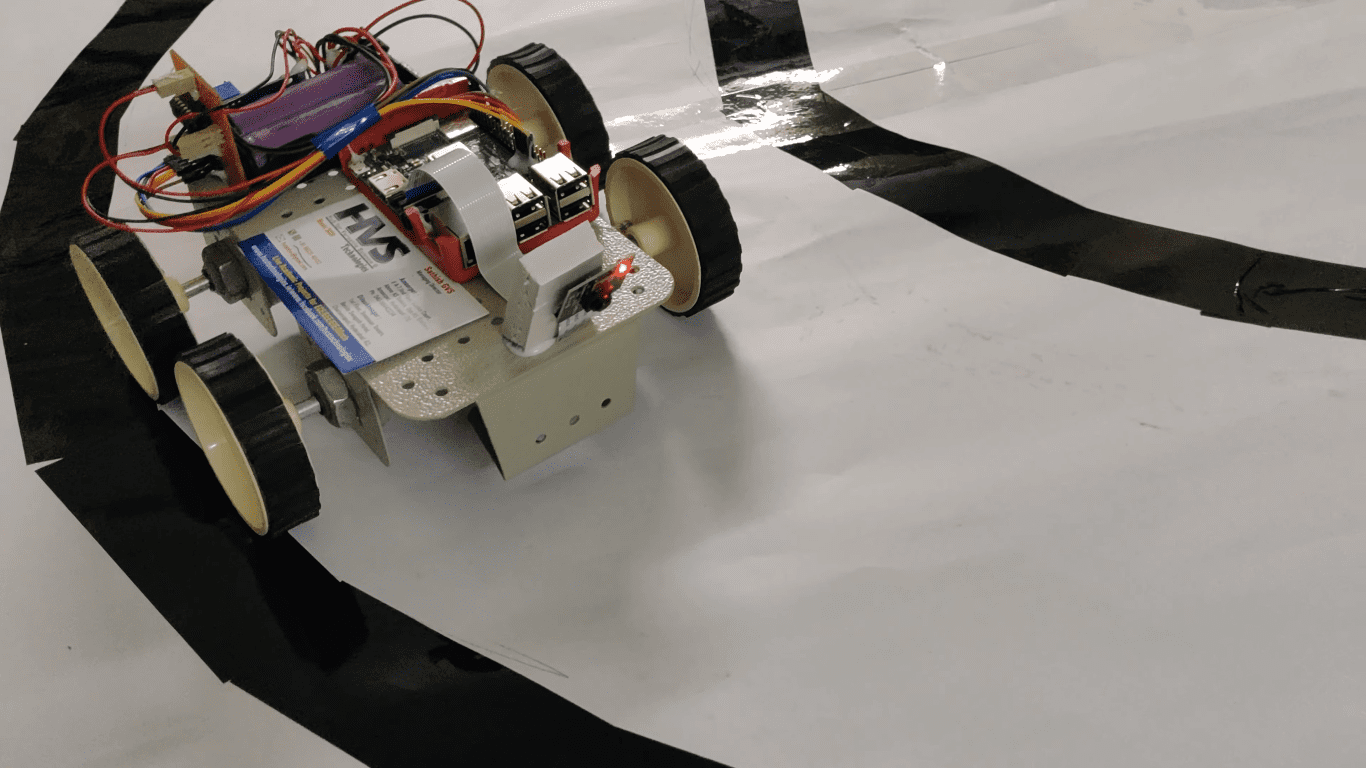
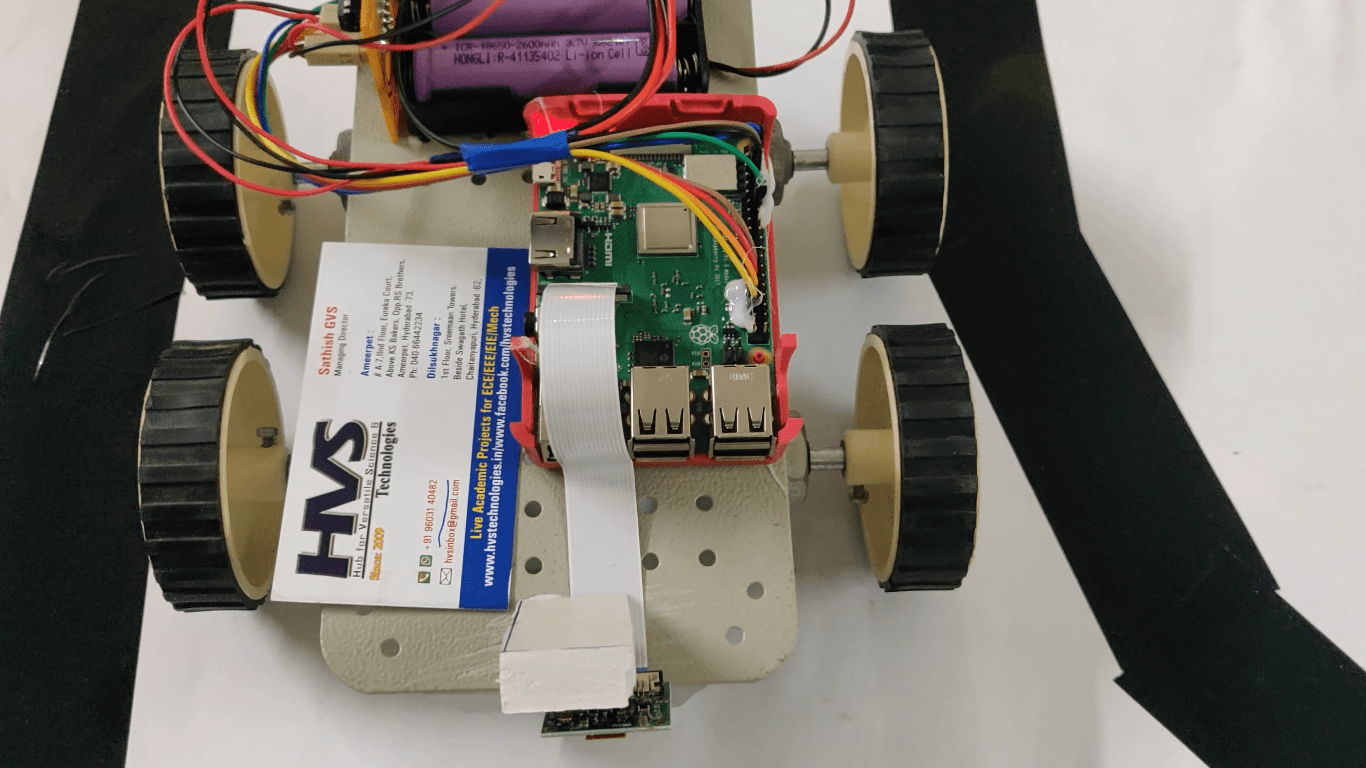
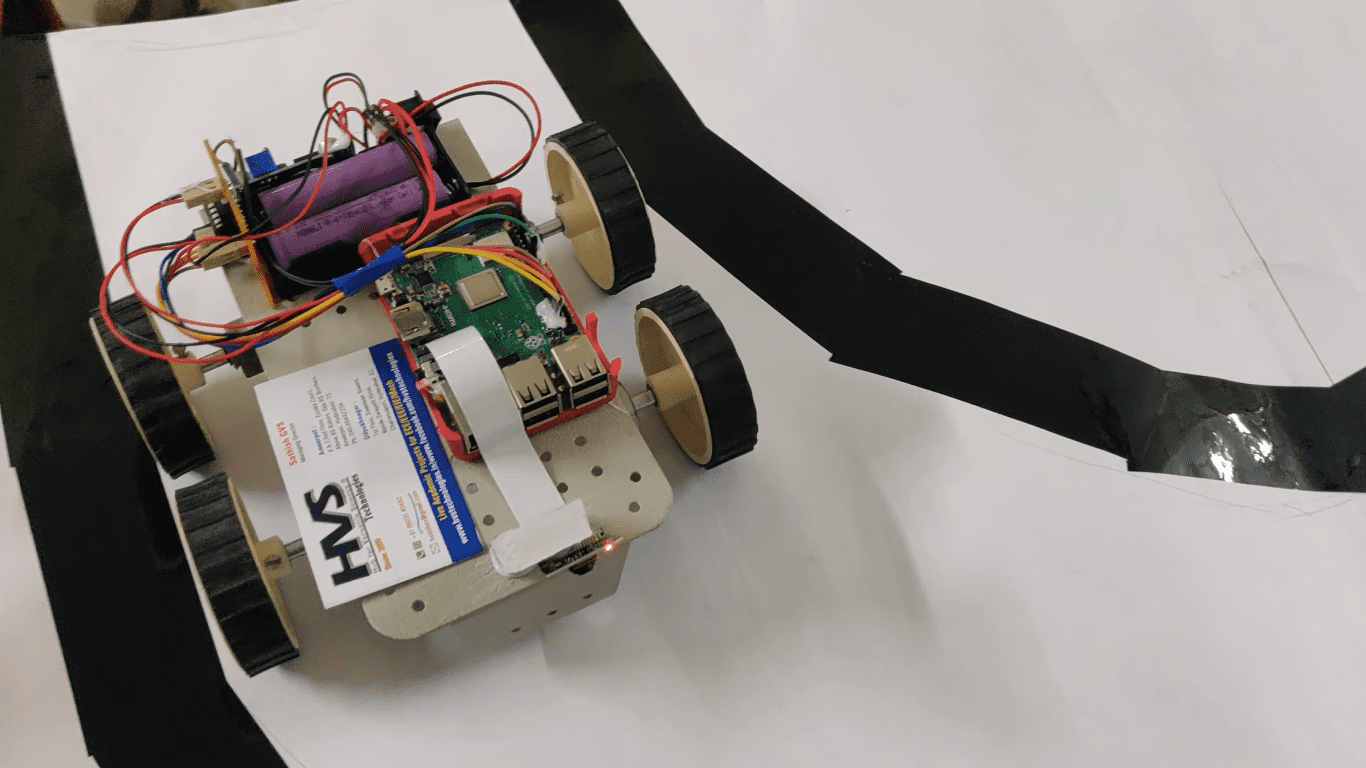
Our prototype would use a modelled car which has a Raspberry pi to process the captured images from the camera. Pi camera is uses to detect the lane, traffic signs (zebra crossing, red light, stop sign) using CNN image processing. CNN is used to recognize the road signs by calculating distance of road sign from the car and relaying the corresponding signal back to the car.
This vehicle consists of 4DC motors along with motor driver to moves the vehicle. Raspberry Pi is used to relay the signal and Arduino Uno, to control the self-driving car. This signal is then sent to Arduino, which controls the driver motors of the self-driving car.
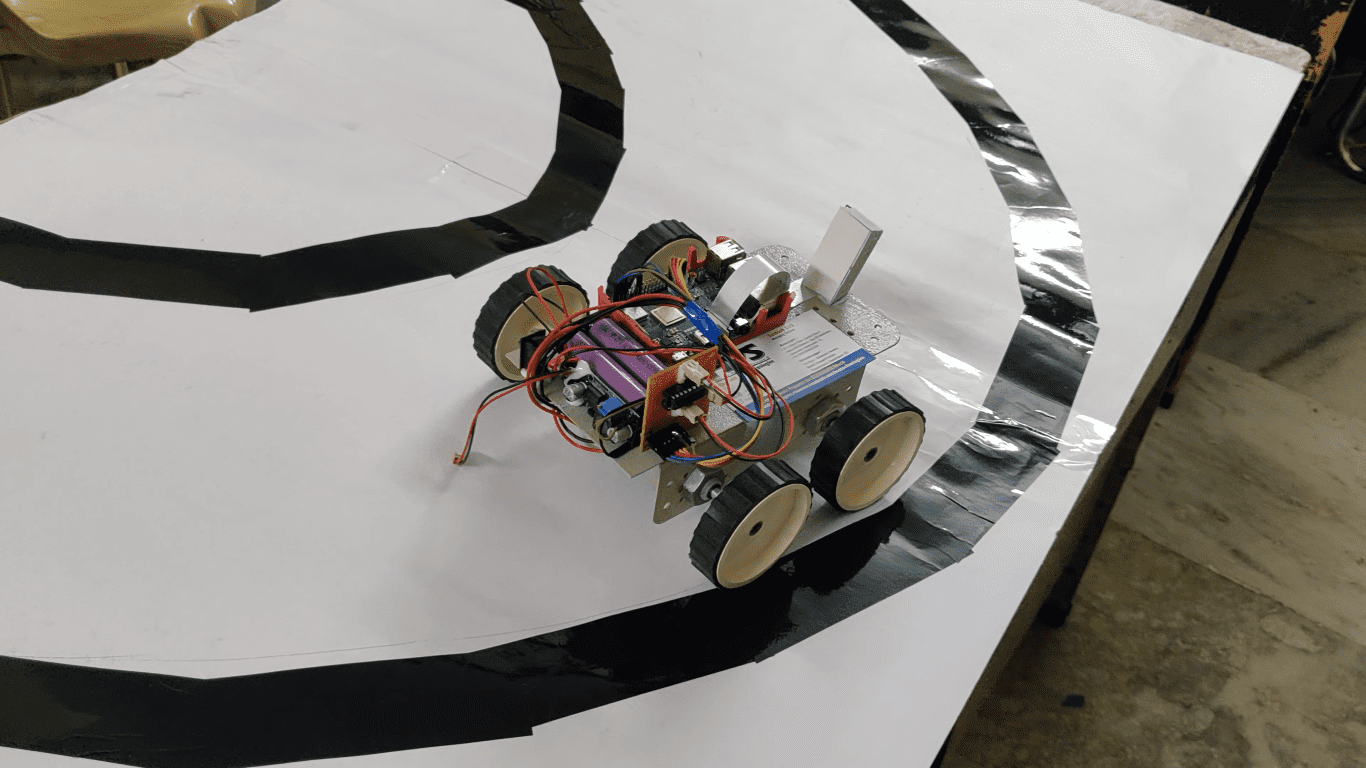
When the user starts the vehicle, it will move forward by following the lane. When the vehicle detects stop sign, it will stop automatically. When the vehicle detects zebra crossing, it will stop certain time and moves forward. When the vehicle detects RED traffic light, it will stop automatically. To achieve this task raspberry pi loaded program written in python language.
Features:
 video:
video:
- Design a self-driving car which can be follow the lane and traffic signs.
- The robot consists of pi camera which is used to detect the lane, traffic signs using raspberry pi and CNN (convolution neural network).
- To achieve this task using raspberry pi3 processor.
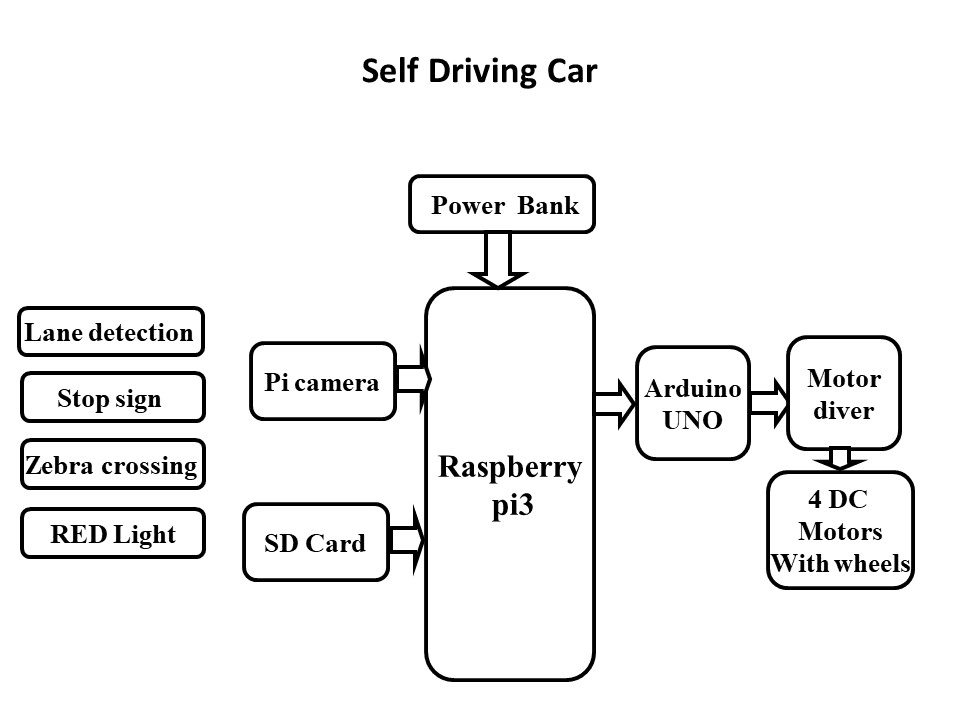
- Power bank.
- Raspberry pi3.
- Pi camera.
- Arduino uno.
- SD card.
- DC motors along with motor driver.
- Python Language.
- Linux OS.
- CNN(Convolutional Neural Network).
Block Diagram:
 video:
video: