Subtotal ₹14,250.00


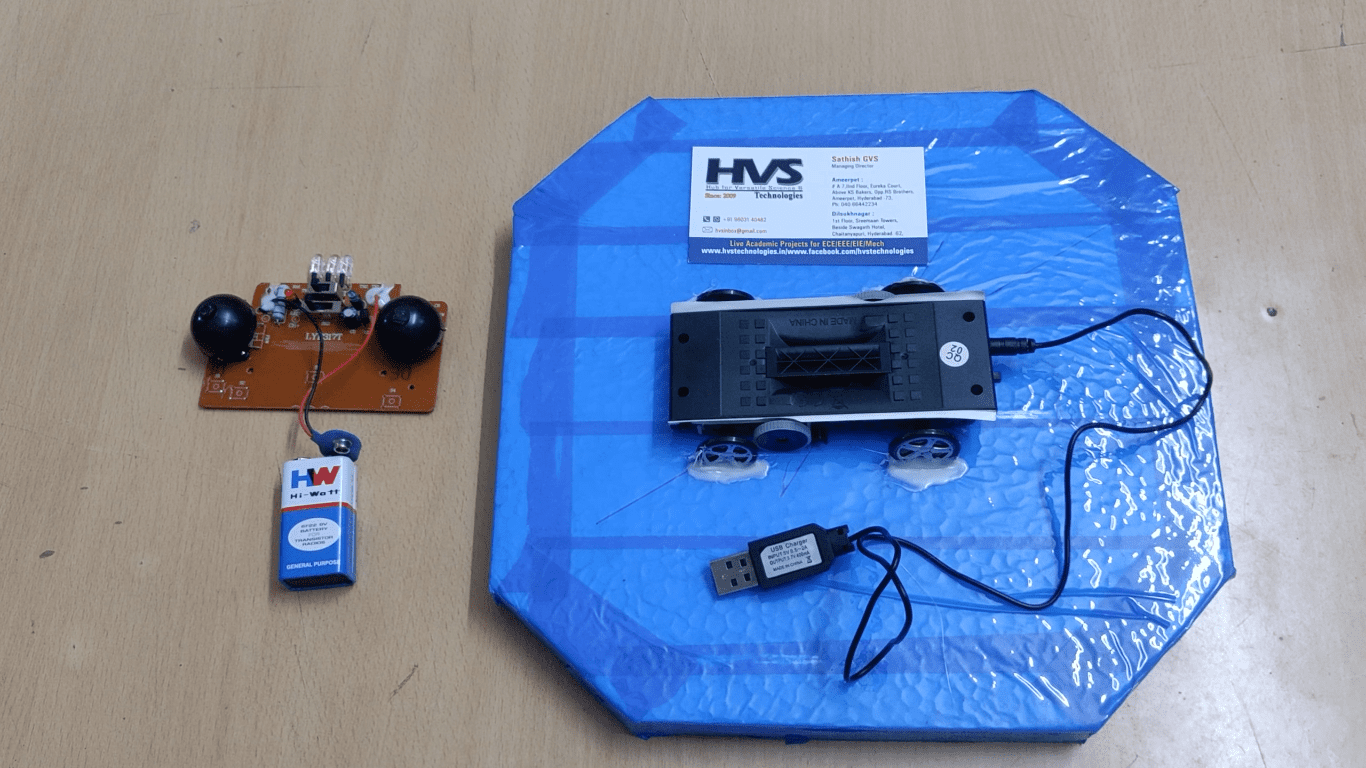
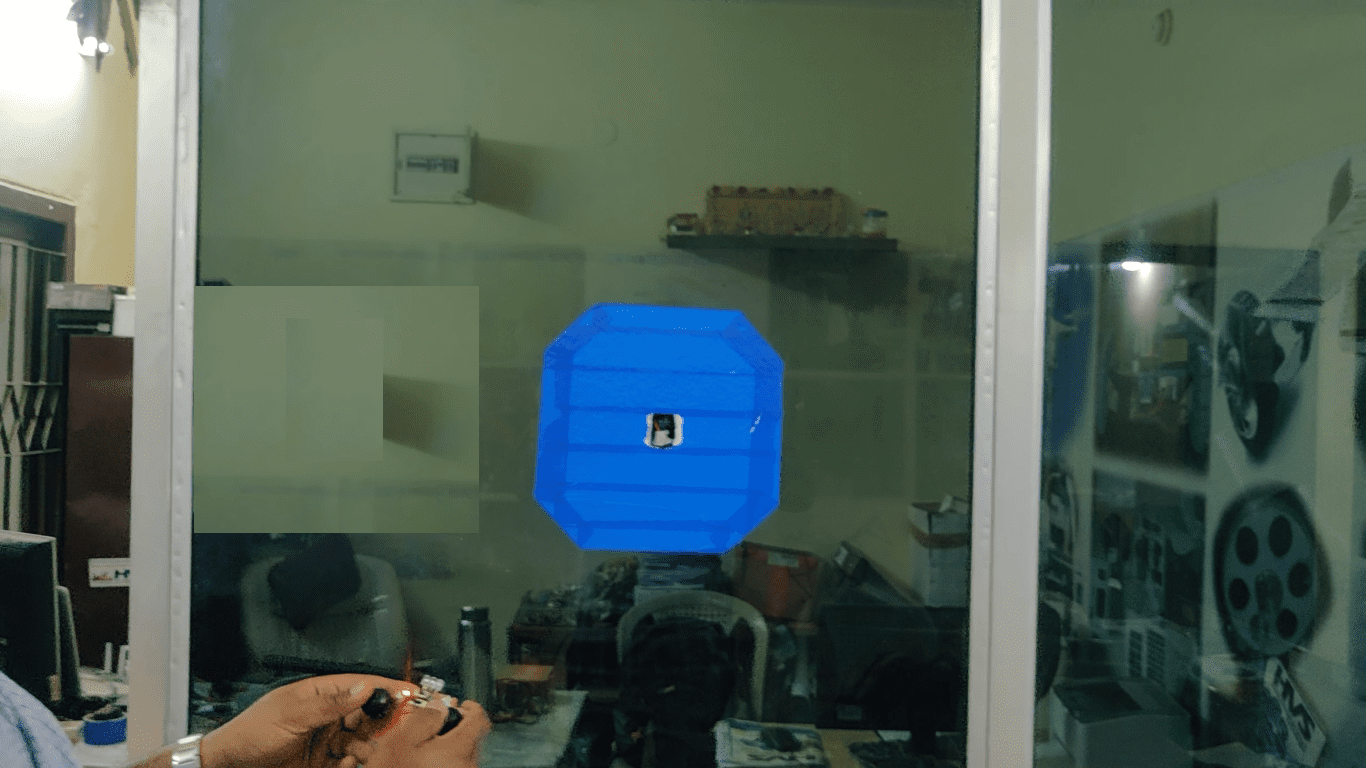
The purpose of wall climbing robots is climbing mainly on the vertical surfaces like that of walls. The robots arerequired to have high, maneuverability and robust & efficient attachment and detachment. The robot can automate tasks which aredone manually with an extra degreed of human safety in a cost effective manner. The robot can move in all the four directionsforward, backward, left and right. The other locomotion capabilities include linear movement, turning movement, lateral movement,rotating and rolling movement. Apart from the reliable attachment principal the robot should have low self weight and high payloadcapacity. The design and control of robot should be such that it can be operated from any place. A wireless communication linkissued for high performance robotic system. Regarding the adhesion to the surface the robots should be able to produce secure gripingforce. The robots should adopt to different surface environments from steel, glass, ceramic, wood, concrete etc. with low energy
Consumptionand cost.
The main objectives of the project:
 video:
video:
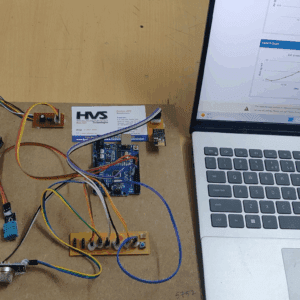
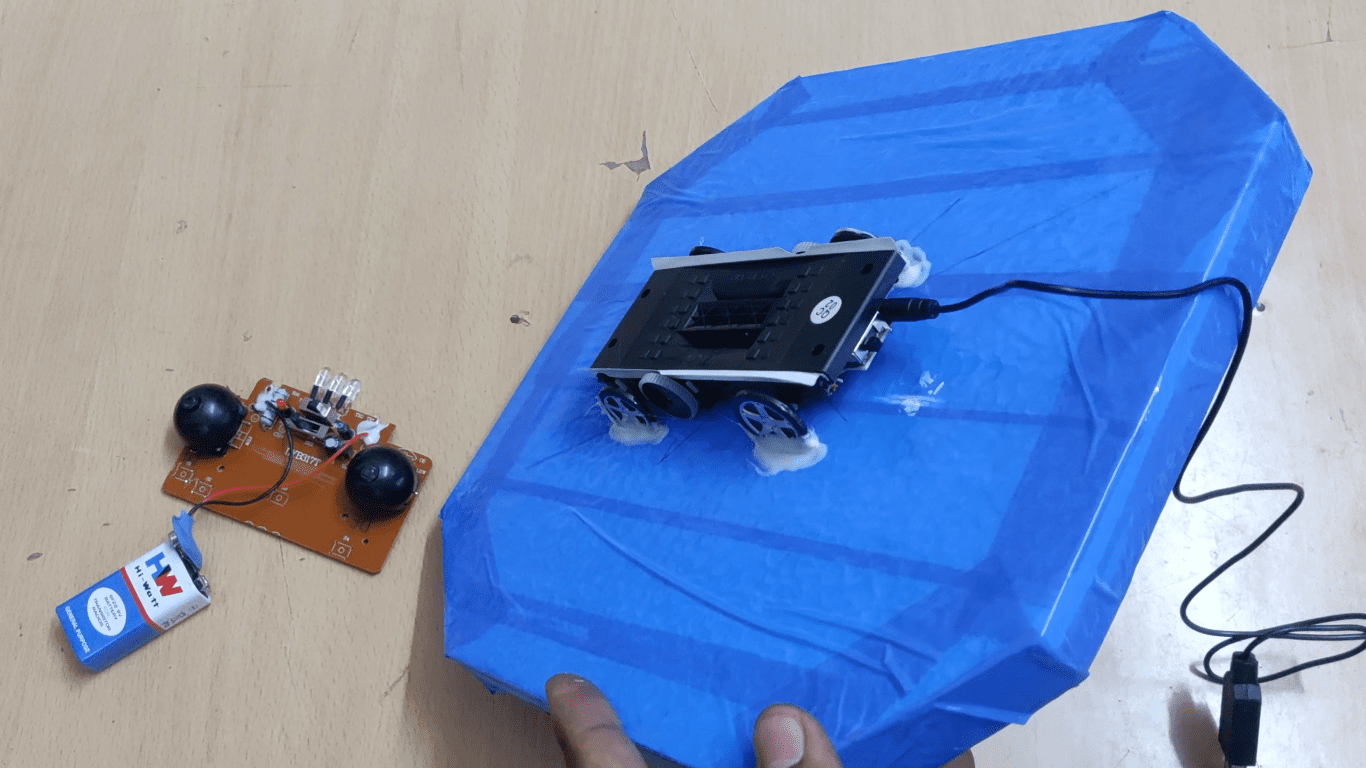
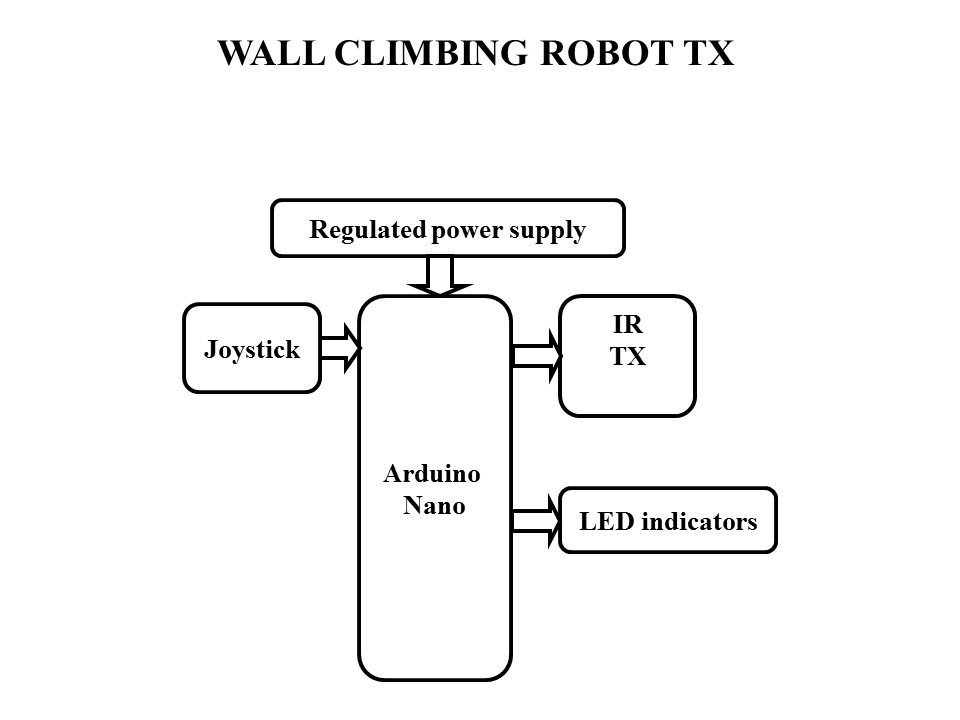
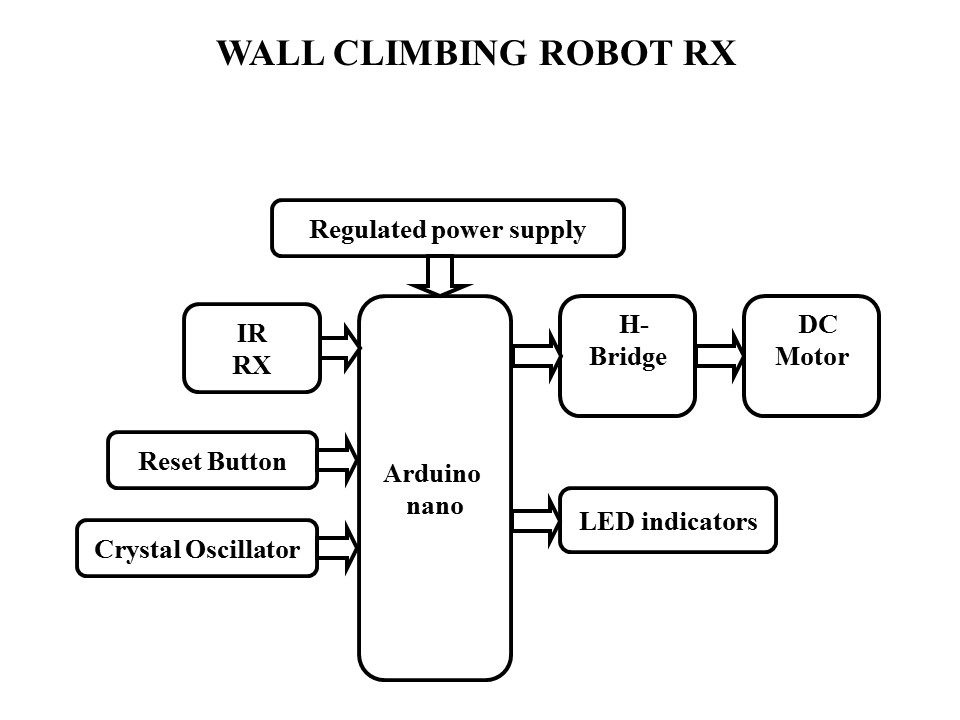
- ARDUINO NANO Microcontroller
- Regulated power supply
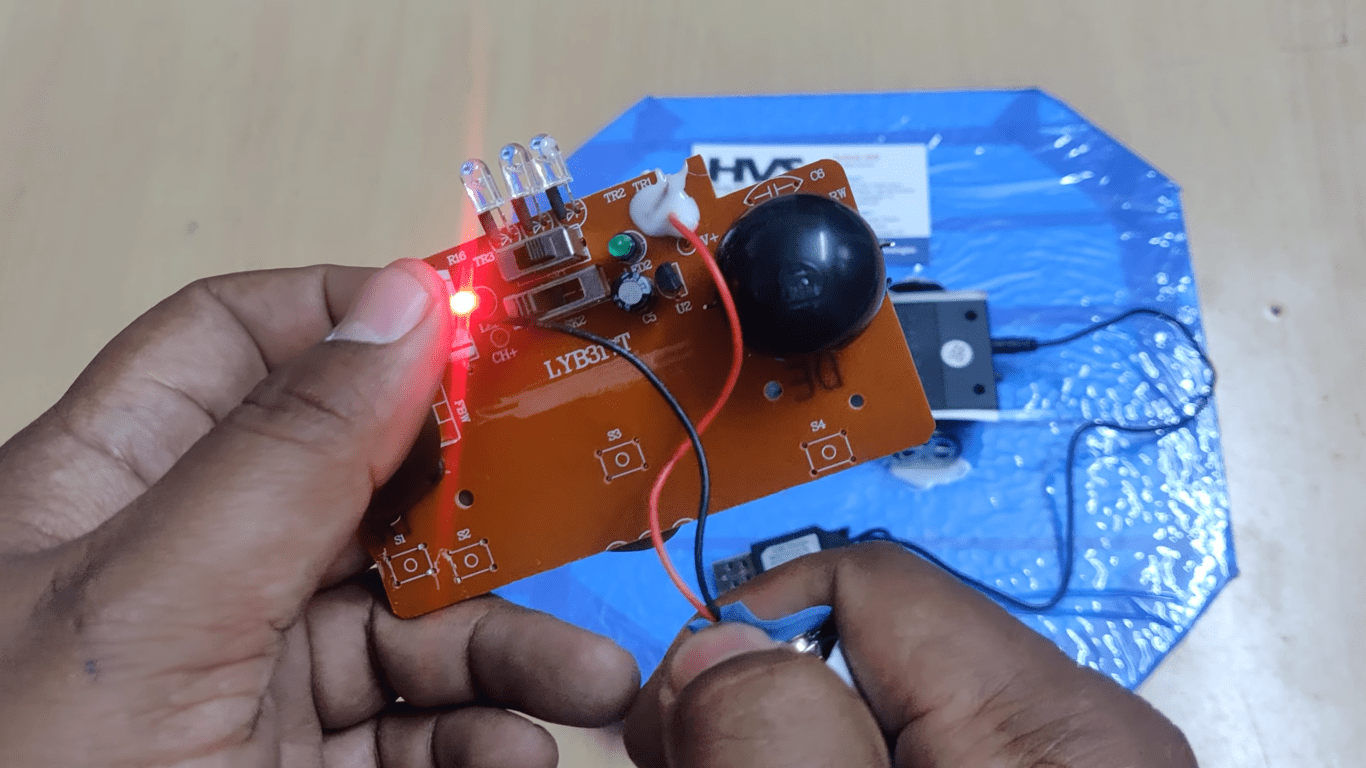
- IR TX
- IR RX
- H-bridge
- Joystick
- Dc motor
- Suction motor
- Arduino ide studio compiler for dumping code into Microcontroller.
- Express SCH for Circuit design.
- Embedded C language.
 video:
video:







